1.How to check if the point is in a rotated bbox?
- 1.1 get the vertices of the rotated bbox *
dims = bbox[3:6]
locs = bbox[0:3]
rots = bbox[6]
kitti_rots = -rots - np.pi / 2
#class_name = l.split(' ')[0]
#dims = np.array(l.split(' ')[8:11], dtype=np.float64)
#locs = np.array(l.split(' ')[11:14], dtype=np.float64)
#rots = np.array(l.split(' ')[14:15], dtype=np.float64)
#dims = dims[[2, 0, 1]]
## transfer the rotation angle to kitti format
##kitti_rots = -rots[0] - np.pi / 2
## transer the dims and locs into kitti format
##locs = locs[[2, 0, 1]]
##locs[2] -= dims[1] / 2
##locs[1] -= dims[0] / 2
# generate 8 vertices from the bounding box's dims locs and rotation
vertices = np.array([
[-dims[0] / 2, -dims[1] / 2, -dims[2] / 2],
[dims[0] / 2, -dims[1] / 2, -dims[2] / 2],
[dims[0] / 2, dims[1] / 2, -dims[2] / 2],
[-dims[0] / 2, dims[1] / 2, -dims[2] / 2],
[-dims[0] / 2, -dims[1] / 2, dims[2] / 2],
[dims[0] / 2, -dims[1] / 2, dims[2] / 2],
[dims[0] / 2, dims[1] / 2, dims[2] / 2],
[-dims[0] / 2, dims[1] / 2, dims[2] / 2],
], dtype=np.float64)
# rotate the vertices
rotMat = np.array([
[np.cos(rots), -np.sin(rots), 0],
[np.sin(rots), np.cos(rots), 0],
[0, 0, 1]
], dtype=np.float64)
vertices = np.dot(vertices, rotMat)
# translate the vertices
vertices = vertices + locs
- 1.2 check if point is in the bbox *
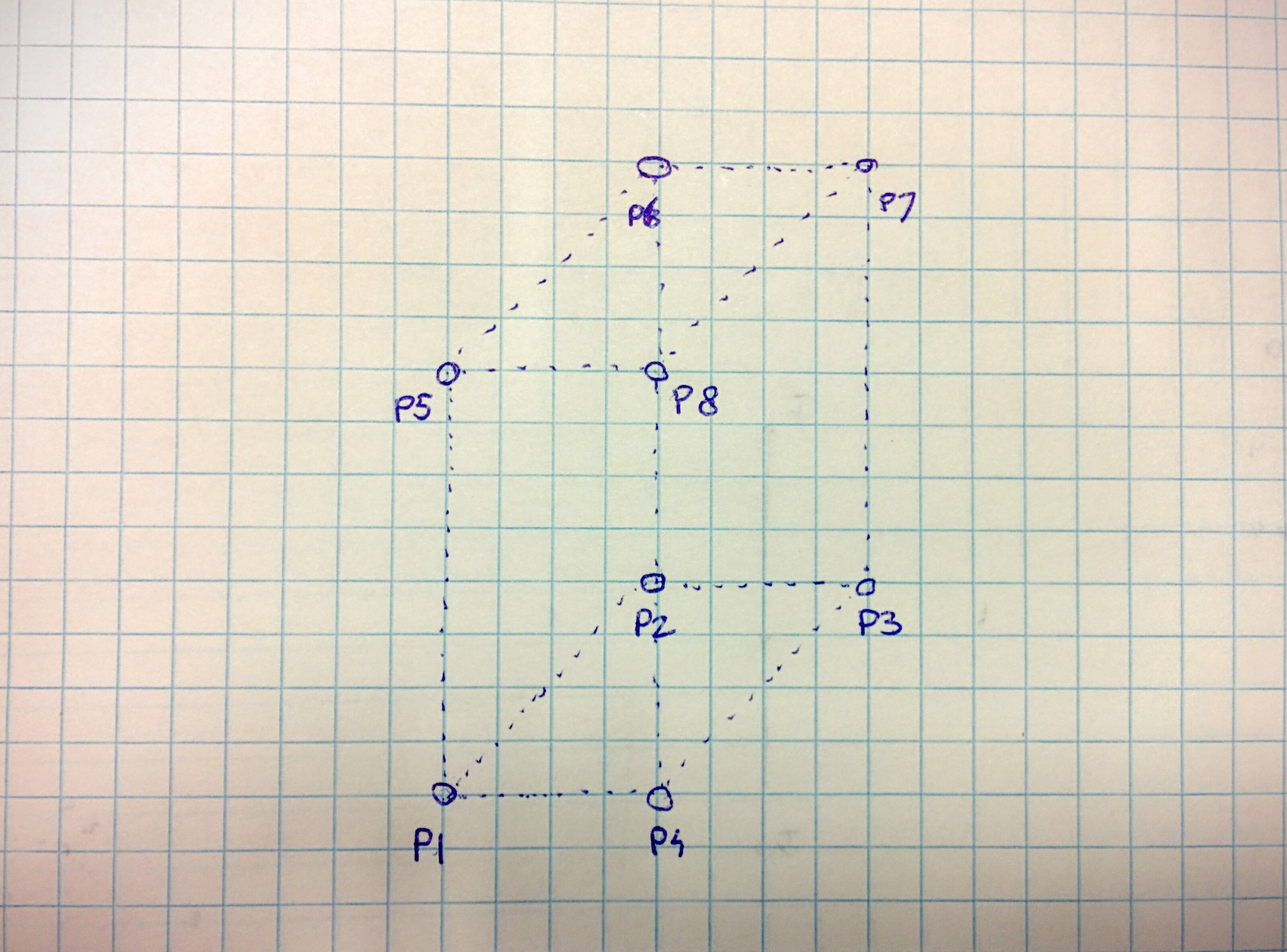 the vertices seems like the above image
The three important directions are u=P1−P2, v=P1−P4 and w=P1−P5. They are three perpendicular edges of the rectangular box.
the vertices seems like the above image
The three important directions are u=P1−P2, v=P1−P4 and w=P1−P5. They are three perpendicular edges of the rectangular box.
A point x lies within the box when the three following constraints are respected:
The dot product \(u \cdot x\) is between \(u \cdot P_1\) and \(u \cdot P_2\)
The dot product \(v \cdot x\) is between \(v \cdot P_1\) and \(v \cdot P_4\)
The dot product \( w \cdot x\) is between \(w \cdot P_1\) and \(w \cdot P_5\)
EDIT: If the edges are not perpendicular, you need vectors that are perpendicular to the faces of the box. Using the cross-product, you can obtain them easily:
$$ u=(P1−P4)×(P1−P5) $$
$$ v=(P1−P2)×(P1−P5) $$
$$ w=(P1−P2)×(P1−P4) $$
then check the dot-products as before.
def find_pts_in_box3d(pts, vertices):
a01 = vertices[1] - vertices[0]
a03 = vertices[3] - vertices[0]
a04 = vertices[4] - vertices[0]
dot010 = np.dot(a01, vertices[0])
dot011 = np.dot(a01, vertices[1])
dot030 = np.dot(a03, vertices[0])
dot033 = np.dot(a03, vertices[3])
dot040 = np.dot(a04, vertices[0])
dot044 = np.dot(a04, vertices[4])
indices = []
for ind, pt in enumerate(pts):
if np.dot(a01, pt) >= dot010 and np.dot(a01, pt) <= dot011 and \
np.dot(a03, pt) >= dot030 and np.dot(a03, pt) <= dot033 and \
np.dot(a04, pt) >= dot040 and np.dot(a04, pt) <= dot044:
indices.append(ind)
return indices